
roboguide_v940396_demo.gif (1.44 MB)
下載附件
2025-6-17 17:47 上傳
安裝文件下載:只是安裝軟件,里面沒(méi)有破解授權(quán)補(bǔ)丁,試用期30天足夠個(gè)人在家學(xué)習(xí)用途。僅提供個(gè)人在家學(xué)習(xí)用途,此程序文件來(lái)源于網(wǎng)絡(luò)可靠性穩(wěn)定性完整性皆無(wú)法驗(yàn)證,禁止用于其他用途,后果自負(fù)。
https://pan.baidu.com/s/1dtEEY_ha7uuSbaKq5etI1A
請(qǐng)先確認(rèn)以上網(wǎng)盤鏈接有效再下載提取碼附件,避免浪費(fèi)積分,若鏈接失效請(qǐng)回帖反饋以便及時(shí)處理
 百度網(wǎng)盤提取碼及解壓密碼.txt
(1.44 KB, 售價(jià): 1 E幣)
百度網(wǎng)盤提取碼及解壓密碼.txt
(1.44 KB, 售價(jià): 1 E幣)
2025-11-1 00:44 上傳
點(diǎn)擊文件名下載附件
售價(jià): 1 E幣 [記錄](méi)
補(bǔ)丁下載:只適用于V9.4 (Rev.ZP) Build lD:9.40396.00.04不要用于其他版本,僅供個(gè)人在家學(xué)習(xí)測(cè)試,穩(wěn)定性可靠性無(wú)法驗(yàn)證,切勿用于其他用途,請(qǐng)下載測(cè)試后2小時(shí)內(nèi)刪除。
 frlicensechecker.zip
(340.52 KB, 售價(jià): 3 E幣)
frlicensechecker.zip
(340.52 KB, 售價(jià): 3 E幣)
2025-6-18 01:34 上傳
點(diǎn)擊文件名下載附件
售價(jià): 3 E幣 [記錄](méi)
補(bǔ)丁使用方法:
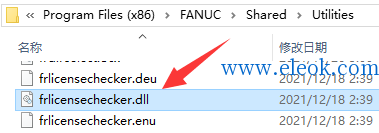
先把原版的frlicensechecker.dll文件備份到其他地方,然后補(bǔ)丁附件里的frlicensechecker.dll替換以下位置的同名原始文件:
x64系統(tǒng) Windows: "C:\Program Files (x86)\FANUC\Shared\Utilities"
x86系統(tǒng) Windows: "C:\Program Files\FANUC\Shared\Utilities"
roboguide_v940396_licensing.png (34.29 KB)
下載附件
2025-6-17 17:47 上傳
roboguide_v940396_about.png (110.72 KB)
下載附件
2025-6-17 17:47 上傳
roboguide_v940396_version.png (29.33 KB)
下載附件
2025-6-17 17:47 上傳
roboguide_v940396_1.png (43.5 KB)
下載附件
2025-6-17 17:47 上傳
ROBOGUIDE V9 (Rev.ZP)
1. What's new
支持 V9.40P/63、V9.30P/34、V7.70P/61 虛擬機(jī)器人。
支持新機(jī)器人型號(hào):CRX-10iA/L Paint。
支持機(jī)器人估算功能:CRX-10iA/L Paint。
2. System Requirements
操作系統(tǒng) Windows 11、Windows 10(32/64 位)、Windows 8.1(32/64 位)、Windows 7(32/64 位) 推薦 64 位 Windows 系統(tǒng)
顯卡
RAM:512 MB
分辨率:1280×1024
色深:24 位
硬件特性:支持 OpenGL 硬件 ——
可用硬盤空間 4 GB ——
附加硬件 以太網(wǎng)、32x DVD 光驅(qū)、鼠標(biāo) ——
OS 要求
需以本地管理員賬戶安裝軟件并注冊(cè)完整版。
需安裝 Internet Explorer 11 或 Chrome V83 及以上版本。
正常字體大小(96 DPI)。
端口 3002 不可作其他用途,ROBOGUIDE 可使用 IP 地址 127.0.0.1 或 127.0.0.n(n≥1),許可證服務(wù)器可使用 127.0.0.2。
計(jì)算機(jī)名稱需由 A-Z、a-z、0-9 或 “-” 組成。
其他限制
不可在同一臺(tái)電腦上安裝 ROBOGUIDE 和 RCS 模塊。
不支持 Windows 7 的 Windows XP 模式、遠(yuǎn)程桌面操作、Windows RT 系統(tǒng)及逗號(hào)作為小數(shù)點(diǎn)分隔符。
不可使用來(lái)賓賬戶,不支持觸控面板操作。
用戶權(quán)限
安裝程序會(huì)自動(dòng)設(shè)置以下文件夾權(quán)限,修改可能導(dǎo)致功能異常:
C:\Program Files (x86)\FANUC:用戶組 “讀取和執(zhí)行” 權(quán)限。
C:\ProgramData\FANUC\FRVRC Media:用戶組 “完全控制” 權(quán)限。
若使用 FRVRC V7.20 P/42 或更早版本,需對(duì) *C:\Program Files (x86)\FANUC\Shared\Off Line\FRVRC\V.\Media 文件夾設(shè)置用戶組 “完全控制” 權(quán)限。
3. Pre-Installation Notes
本地管理員權(quán)限
FANUC 安裝程序需完整的本地管理員權(quán)限,建議通過(guò) “以管理員身份運(yùn)行” 啟動(dòng) setup.exe。
防火墻設(shè)置
ROBOGUIDE 通過(guò)網(wǎng)絡(luò)協(xié)議通信,需在防火墻中允許以下程序訪問(wèn):
C:\Program Files\FANUC\ROBOGUIDE\bin\ROBOGUIDECore.exe
C:\Program Files (x86)\FANUC\ROBOGUIDE\bin\FRMotionServer.exe
C:\Program Files (x86)\FANUC\Shared\Robot Server\frrobot.exe
C:\Program Files (x86)\FANUC\Shared\Robot Server\frrobotneighborhood.exe
C:\Program Files (x86)\FANUC\Shared\Utilities\FRLicenseManager.exe
若虛擬機(jī)器人需與外部通信,需允許 C:\Program Files (x86)\FANUC\Shared\Off Line\FRVRC\frvirtual.exe。
工作站兼容性
新版本工作站數(shù)據(jù)結(jié)構(gòu)可能與舊版本不兼容,建議安裝前備份現(xiàn)有工作站。
OpenGL 兼容性
部分顯卡可能存在問(wèn)題,需更新驅(qū)動(dòng)或禁用硬件加速以確保 AVI 捕獲和基本功能正常。
循環(huán)時(shí)間精度
ROBOGUIDE 僅對(duì)運(yùn)動(dòng)和等待指令的循環(huán)時(shí)間報(bào)告準(zhǔn)確,其他指令無(wú)法精確預(yù)測(cè)。
4. Installing ROBOGUIDE
前提條件
需安裝 .NET 3.5 框架:
Windows 8.1 及以上:通過(guò) “控制面板> 程序 > 啟用或關(guān)閉 Windows 功能” 手動(dòng)啟用。
命令行安裝(以管理員身份運(yùn)行命令提示符):
DISM /Online /Enable-Feature /FeatureName:NetFx3 /All /LimitAccess /Source:d:\sources\sxs
(其中 “d” 為 Windows 安裝盤驅(qū)動(dòng)器號(hào))。
安裝注意事項(xiàng)
若 Windows 8.1 安裝失敗,需先安裝 .NET 3.5 框架。
若安裝時(shí)出現(xiàn) “OLEAUT32.DLL” 或 “STDOLE2.TLB” 訪問(wèn)錯(cuò)誤,或 Visual C++ 運(yùn)行庫(kù)安裝失敗,可右鍵 setup.exe 選擇 “兼容性疑難解答(Windows 7)”。
5. ROBOGUIDE Features
集成化圖形界面:簡(jiǎn)化機(jī)器人工作站示教流程。
工藝導(dǎo)航器、工作站教程、幫助文檔及示例工作站。
3D 環(huán)境操作:支持縮放、平移、旋轉(zhuǎn)。
機(jī)器人 jogging:支持末端拖放示教和傳統(tǒng)示教器式 jogging。
工作站建模:
支持 IGES CAD 導(dǎo)入及球體、矩形、圓柱體等基本形狀。
內(nèi)置 CAD 庫(kù),可添加自定義圖像。
多組和多軸機(jī)器創(chuàng)建:支持機(jī)器人控制器電機(jī)驅(qū)動(dòng)配置。
程序示教:
創(chuàng)建基礎(chǔ) TPP 程序,支持手動(dòng)輸入、 jogging 示教或點(diǎn)擊對(duì)象示教。
支持 MH PICK/PLACE 自動(dòng)示教、運(yùn)動(dòng) / 等待指令及單程序運(yùn)行。
CAD 程序生成:從 CAD 文件實(shí)體自動(dòng)生成機(jī)器人程序,減少編程時(shí)間。
UTOOLS 與 UFRAMES 支持:
附加工具圖形,定義 UTOOL 值。
關(guān)聯(lián) UFRAMES 與工作站對(duì)象,支持相對(duì)坐標(biāo)示教和坐標(biāo)系快速切換。
快速可達(dá)性檢查與程序執(zhí)行:
支持運(yùn)行 / 暫停 / 中止程序,生成循環(huán)時(shí)間信息和報(bào)警日志。
TP 分析器:顯示線段時(shí)間、程序時(shí)間及運(yùn)動(dòng)軌跡對(duì)比。
AVI 視頻創(chuàng)建:支持多分辨率工作站運(yùn)行視頻導(dǎo)出。
虛擬機(jī)器人接口:虛擬示教器、KCL 命令窗口、Web 服務(wù)器窗口。
** HandlingTool TPP 指令支持 **:與真實(shí)機(jī)器人編程邏輯一致。
虛擬機(jī)器人配置:支持選項(xiàng)功能自定義。
程序仿真與轉(zhuǎn)換:支持仿真程序和 TP 程序,仿真程序可快速轉(zhuǎn)換為可下載至真實(shí)機(jī)器人的 TP 程序。
6. Supported Virtual Robot Controllers
支持的機(jī)器人控制器列于機(jī)器人創(chuàng)建時(shí)的序列化向?qū)е小?br />
7. Supported Robot Models
支持的機(jī)器人模型列于機(jī)器人創(chuàng)建時(shí)的序列化向?qū)е小?br />
【必讀】版權(quán)免責(zé)聲明
1、本主題所有言論和內(nèi)容純屬會(huì)員個(gè)人意見(jiàn),與本論壇立場(chǎng)無(wú)關(guān)。2、本站對(duì)所發(fā)內(nèi)容真實(shí)性、客觀性、可用性不做任何保證也不負(fù)任何責(zé)任,網(wǎng)友之間僅出于學(xué)習(xí)目的進(jìn)行交流。3、對(duì)提供的數(shù)字內(nèi)容不擁有任何權(quán)利,其版權(quán)歸原著者擁有。請(qǐng)勿將該數(shù)字內(nèi)容進(jìn)行商業(yè)交易、轉(zhuǎn)載等行為,該內(nèi)容只為學(xué)習(xí)所提供,使用后發(fā)生的一切問(wèn)題與本站無(wú)關(guān)。 4、本網(wǎng)站不保證本站提供的下載資源的準(zhǔn)確性、安全性和完整性;同時(shí)本網(wǎng)站也不承擔(dān)用戶因使用這些下載資源對(duì)自己和他人造成任何形式的損失或傷害。 5、本網(wǎng)站所有軟件和資料均為網(wǎng)友推薦收集整理而來(lái),僅供學(xué)習(xí)用途使用,請(qǐng)務(wù)必下載后兩小時(shí)內(nèi)刪除,禁止商用。6、如有侵犯你版權(quán)的,請(qǐng)及時(shí)聯(lián)系我們(電子郵箱1370723259@qq.com)指出,本站將立即改正。
|
